産業用ロボットエンドエフェクタ/多指ロボットハンドグリッパ
多指ロボットハンドグリッパ
 高精度遠隔操作用機械式外骨格グローブHonpine EG機械式外骨格グローブは、高精度な手の動作キャプチャと補助制御に特化した外骨格グローブ製品です。中核となる磁気エンコーダ技術を搭載し、手指関節角度の検出において高精度を実現するだけでなく、位置ドリフトも排除します。さらに、ESP-NOW無線伝送技術と動的マッピング較正アルゴリズムを統合することで、器用なハンドの高精度な遠隔操作を可能にします。現在、本製品は産業製造、医療リハビリテーション、科学研究などの分野で広く活用されており、多様なシナリオにおける実用ニーズに対応します。詳細
高精度遠隔操作用機械式外骨格グローブHonpine EG機械式外骨格グローブは、高精度な手の動作キャプチャと補助制御に特化した外骨格グローブ製品です。中核となる磁気エンコーダ技術を搭載し、手指関節角度の検出において高精度を実現するだけでなく、位置ドリフトも排除します。さらに、ESP-NOW無線伝送技術と動的マッピング較正アルゴリズムを統合することで、器用なハンドの高精度な遠隔操作を可能にします。現在、本製品は産業製造、医療リハビリテーション、科学研究などの分野で広く活用されており、多様なシナリオにおける実用ニーズに対応します。詳細 VR AR遠隔操作向けインテリジェントロボティクステレオペレーショングローブHONPINEテレオペレーショングローブは、インテリジェントロボティクスおよび遠隔制御用途向けに設計された高精度な手の動作キャプチャデバイスです。高度なモーションキャプチャ技術と当社が独自に開発したダイナミックマッピングアルゴリズムに基づき、このグローブは多関節ハンドの精密な制御を実現します。手の動きをリアルタイムでキャプチャして伝送することにより、ユーザーはロボットハンドグリッパを自然かつ直感的に操作でき、遠隔操作、仮想現実 (VR)、拡張現実 (AR)、スマートマニュファクチャリングなど、さまざまなアプリケーションシナリオのニーズに対応します。詳細
VR AR遠隔操作向けインテリジェントロボティクステレオペレーショングローブHONPINEテレオペレーショングローブは、インテリジェントロボティクスおよび遠隔制御用途向けに設計された高精度な手の動作キャプチャデバイスです。高度なモーションキャプチャ技術と当社が独自に開発したダイナミックマッピングアルゴリズムに基づき、このグローブは多関節ハンドの精密な制御を実現します。手の動きをリアルタイムでキャプチャして伝送することにより、ユーザーはロボットハンドグリッパを自然かつ直感的に操作でき、遠隔操作、仮想現実 (VR)、拡張現実 (AR)、スマートマニュファクチャリングなど、さまざまなアプリケーションシナリオのニーズに対応します。詳細- 高精度制御 21-DoF 産業用多指巧緻ハンドHONPINE L30は、ミリメートルレベルの操作精度で人の手の繊細な動きを正確に再現する21-DoFの巧緻ハンドです。先進的な腱駆動と高度に統合されたメカトロニクスシステムを採用し、安定した動作と精密な制御を実現するとともに、マルチモーダル知覚(力覚、触覚、視覚)をサポートして、リアルタイム知覚とインタラクションの信頼性を向上させます。高い自由度、マルチモーダル知覚、先進的なモーション制御アルゴリズムにより、産業自動化、医療支援、研究実験で広く活用されており、高い適応性と信頼性を備えたエンドエフェクタソリューションを提供します。詳細
- 高精度21自由度 人間の自然な手の把持を再現する多指ハンドHONPINE L20は、繊細な操作で人間の自然な手の把持を正確に再現する21自由度の多指ハンドです。革新的なリンク伝動と自社開発モーターを採用し、高精度な動作を実現するとともに、力覚、視覚、触覚センサーに対応し、マルチモーダル知覚によって環境適応性とインテリジェントな相互作用を向上させます。高自由度、マルチモーダル知覚、力-位置ハイブリッドアルゴリズムにより、教育・研究、産業オートメーション、家庭支援、高齢者介護などで幅広く活用され、精密で器用な操作ソリューションを提供します。詳細
- 高性能精密制御ロボット人間型バイオニック多指ハンドHONPINE Robot Hand L10は、20 DoFsを備えた高性能な多指巧緻ハンドです。自社開発のモーターとリンク伝達機構を搭載し、牽引安定性を確保しながら、精密な制御と滑らかな動作を実現します。教育 & research、ピアノ演奏、家庭支援、高齢者介護などの分野で広く使用されており、知能ロボットと人とロボットの協働の発展および実用化を推進します。各種センサーによるマルチモーダルな
環境認識をサポートし、ROS/QT環境と互換性があります(標準ROSプラグインによる二次開発に対応)。詳細  ロボットシステム向け高性能17自由度多指ハンドHONPINE 07ロボットハンドグリッパは、17自由度を備えた高性能な多指ハンドです。自社開発モーターを搭載し、コスト管理と信頼性の高い把持・操作性能を両立し、多様なアプリケーションニーズに対応します。二次開発向けのROSプラグインを提供しており、教育・研究、補助把持、インテリジェントインタラクションに適しており、ロボットシステム向けに効率的で経済的な多指ハンドソリューションを提供します。詳細
ロボットシステム向け高性能17自由度多指ハンドHONPINE 07ロボットハンドグリッパは、17自由度を備えた高性能な多指ハンドです。自社開発モーターを搭載し、コスト管理と信頼性の高い把持・操作性能を両立し、多様なアプリケーションニーズに対応します。二次開発向けのROSプラグインを提供しており、教育・研究、補助把持、インテリジェントインタラクションに適しており、ロボットシステム向けに効率的で経済的な多指ハンドソリューションを提供します。詳細- 高精度 コンパクト 高把持力 バイオニック多関節ハンドHONPINE O6 バイオニック多関節ハンドは、6つの能動関節と5つの受動関節を備えています。高い把持力、精密な力制御、コンパクトなサイズ、軽量設計を実現しています。特に、物流ハンドリング、産業組立、不定形物の把持などの用途に適しています。詳細
- ヒューマノイド指関節設計ロボット器用ハンドロボット器用ハンドは、人の手を高度に模倣したロボットエンドエフェクタです。五指の人型構造設計を採用し、15を超える自由度によって人の手の関節動作を再現し、把持やつまみなどの精密作業を実現します。これは、ロボットが複雑なタスクを実行するための中核部品です。ロボットエンドエフェクタにおけるグリッパー型装置に属します。従来の二指グリッパーとは異なり、マルチモーダル知覚とインテリジェント制御機能を備え、不規則な形状の物体に適応し、精密操作タスクを完了できます。詳細








電動グリッパー
 HONPINE WEPGシリーズ 食品産業向け計量電動グリッパHONPINE WEPG Series計量電動グリッパは, 現在WEPG01, WEPG05, WEPG-T08, WEPG-T15の各モデルをラインアップしており, 最大可搬質量はそれぞれ1 kg, 5 kg, 8 kg, 15 kgに対応しています. このラインアップはリチウム電池生産における重量要件を十分にサポートし, ほとんどの産業用計量用途をカバーします.
HONPINE WEPGシリーズ 食品産業向け計量電動グリッパHONPINE WEPG Series計量電動グリッパは, 現在WEPG01, WEPG05, WEPG-T08, WEPG-T15の各モデルをラインアップしており, 最大可搬質量はそれぞれ1 kg, 5 kg, 8 kg, 15 kgに対応しています. このラインアップはリチウム電池生産における重量要件を十分にサポートし, ほとんどの産業用計量用途をカバーします.
リチウム電池製造ラインで広く採用されているほか, WEPG Seriesは自動車, 医薬品, 食品加工業界でも導入実績があり, 複数分野で代表的な顧客に採用されています. また, 本シリーズは多様なシーンの計量用途に向けたカスタマイズソリューションにも対応しています.詳細 HONPINE EPG-FLEX シリーズ 精密製造向け電動パラレルグリッパ少量多品種のフレキシブル製造の台頭に伴い, 自動化設備の迅速な再構成が不可欠になっています. 従来の固定設計型電動グリッパーは, 生産プロセスや適用シーンの頻繁な変更に対応することが難しい場合があります.
HONPINE EPG-FLEX シリーズ 精密製造向け電動パラレルグリッパ少量多品種のフレキシブル製造の台頭に伴い, 自動化設備の迅速な再構成が不可欠になっています. 従来の固定設計型電動グリッパーは, 生産プロセスや適用シーンの頻繁な変更に対応することが難しい場合があります.
HONPINE EPG-FLEX Series Electric Parallel Grippersは, モジュール標準化と柔軟な構成というコンセプトに基づき, この需要に対応するために設計されています. HONPINEの電動グリッパー製品群における先進的なアップグレードとして, EPG-FLEX Seriesは複雑な産業オートメーション環境に対して, より適応性の高いソリューションを提供します.
本シリーズは, 3Cエレクトロニクス業界における多品種部品組立, 新エネルギー生産ラインにおけるマルチステーション切替, 半導体製造における補助的なマテリアルハンドリングなどの用途で, 優れた性能を実証しています.詳細 産業オートメーション向け電動平行グリッパー 空圧グリッパーを容易に置き換えHONPINE EPG-STシリーズ電動平行グリッパーは、ピック&プレースおよびマテリアルハンドリング用途において、従来の空圧グリッパーに代わるコスト効率の高い代替品として設計されています。モーター、ドライバー、コントローラーを一体化しているため、既存の生産ラインを改造することなく、同サイズの空圧グリッパーを直接置き換えることができます。空圧ソリューションと比較して、EPG-STシリーズは圧縮空気の消費量を削減し、設置と操作を簡素化し、より高い制御性と信頼性を実現します。3C電子機器組立、新エネルギー電池ハンドリング、ライフサイエンス研究所などの用途で実証済みのEPG-STシリーズは、空圧から電動オートメーションへの移行を加速する、効率的で使いやすいソリューションを提供します。詳細
産業オートメーション向け電動平行グリッパー 空圧グリッパーを容易に置き換えHONPINE EPG-STシリーズ電動平行グリッパーは、ピック&プレースおよびマテリアルハンドリング用途において、従来の空圧グリッパーに代わるコスト効率の高い代替品として設計されています。モーター、ドライバー、コントローラーを一体化しているため、既存の生産ラインを改造することなく、同サイズの空圧グリッパーを直接置き換えることができます。空圧ソリューションと比較して、EPG-STシリーズは圧縮空気の消費量を削減し、設置と操作を簡素化し、より高い制御性と信頼性を実現します。3C電子機器組立、新エネルギー電池ハンドリング、ライフサイエンス研究所などの用途で実証済みのEPG-STシリーズは、空圧から電動オートメーションへの移行を加速する、効率的で使いやすいソリューションを提供します。詳細 高精度 ZR リニア回転ロータリーアクチュエータリニアロータリーアクチュエータ(ZR アクチュエータとも呼ばれる)は、リニア昇降(Z軸)と 360° 回転(R軸)の機能を組み合わせた、高度に統合された 2 次元モーションモジュールです。高精度なリニア動作にはリニアモーターを使用し、回転動作の駆動にはサーボモーターを使用します。2 軸を組み合わせることで、昇降、回転、角度補正などの同期複合動作を実行できます。半導体チップ実装や精密組立などの高精度用途に最適です。詳細
高精度 ZR リニア回転ロータリーアクチュエータリニアロータリーアクチュエータ(ZR アクチュエータとも呼ばれる)は、リニア昇降(Z軸)と 360° 回転(R軸)の機能を組み合わせた、高度に統合された 2 次元モーションモジュールです。高精度なリニア動作にはリニアモーターを使用し、回転動作の駆動にはサーボモーターを使用します。2 軸を組み合わせることで、昇降、回転、角度補正などの同期複合動作を実行できます。半導体チップ実装や精密組立などの高精度用途に最適です。詳細 産業用インテリジェントロボットサーボ電動グリッパーロボット電動グリッパーは、サーボモーターによって駆動されるインテリジェントなエンドエフェクターであり、産業オートメーションのシナリオ向けに設計されており、ロボットの末端で精密な材料の把持、搬送および組立を実現できます。その中核はモーター、減速機構、センサーおよび制御システムで構成されており、ミリメートルレベルからミクロンレベルの精度による適応把持をサポートし、電子部品、医療機器、精密部品などの微小ワークの柔軟な生産に適しています。詳細
産業用インテリジェントロボットサーボ電動グリッパーロボット電動グリッパーは、サーボモーターによって駆動されるインテリジェントなエンドエフェクターであり、産業オートメーションのシナリオ向けに設計されており、ロボットの末端で精密な材料の把持、搬送および組立を実現できます。その中核はモーター、減速機構、センサーおよび制御システムで構成されており、ミリメートルレベルからミクロンレベルの精度による適応把持をサポートし、電子部品、医療機器、精密部品などの微小ワークの柔軟な生産に適しています。詳細 360°高精度制御電動回転グリッパーエンドエフェクター電動回転グリッパーは、把持機能と回転機能を組み合わせたメカトロニクス式エンドエフェクターです。内蔵サーボモーターによりギアまたは同期ベルト機構を駆動し、ワーク把持中の同期回転(ボトルキャップの締め付けやギアの組立など)を実現します。中核構成は、モーター、減速機、グリッパー機構、およびコントローラーです。360°全方位の回転と回転角度の高精度制御に対応し、自動組立ラインや実験機器の操作などの用途に適しています。詳細
360°高精度制御電動回転グリッパーエンドエフェクター電動回転グリッパーは、把持機能と回転機能を組み合わせたメカトロニクス式エンドエフェクターです。内蔵サーボモーターによりギアまたは同期ベルト機構を駆動し、ワーク把持中の同期回転(ボトルキャップの締め付けやギアの組立など)を実現します。中核構成は、モーター、減速機、グリッパー機構、およびコントローラーです。360°全方位の回転と回転角度の高精度制御に対応し、自動組立ラインや実験機器の操作などの用途に適しています。詳細 高速・安定型ロボット電動パラレルグリッパー電動パラレルグリッパーは、精密なモーター駆動と伝達機構により、物体を高速かつ安定して把持できる革新的なロボットエンドエフェクタです。把持フィンガーは平面上で平行に動作し、最大調整可能ストロークは0-180mm、単指把持力は2N~800Nです。先進的なモーター技術と人工知能アルゴリズムを採用し、さまざまな複雑な環境において把持方法を自動調整して、異なる物体の形状、サイズ、位置に適応します。この装置は外部エア源を必要とせず、コンパクト構造で、複数の取り付け方法に対応し、省スペース環境での設置に適しています。詳細
高速・安定型ロボット電動パラレルグリッパー電動パラレルグリッパーは、精密なモーター駆動と伝達機構により、物体を高速かつ安定して把持できる革新的なロボットエンドエフェクタです。把持フィンガーは平面上で平行に動作し、最大調整可能ストロークは0-180mm、単指把持力は2N~800Nです。先進的なモーター技術と人工知能アルゴリズムを採用し、さまざまな複雑な環境において把持方法を自動調整して、異なる物体の形状、サイズ、位置に適応します。この装置は外部エア源を必要とせず、コンパクト構造で、複数の取り付け方法に対応し、省スペース環境での設置に適しています。詳細







マイクロ電動シリンダー

電動真空サクションカップ
 EVSシリーズ 産業オートメーションのパレタイジング用電動真空アクチュエータHONPINE EVS Series 電動真空アクチュエータは、ピックアンドプレース、パレタイジング、マテリアルハンドリングなどの産業オートメーション向けに設計された、コンパクトで省エネルギーな EOAT ソリューションです.
EVSシリーズ 産業オートメーションのパレタイジング用電動真空アクチュエータHONPINE EVS Series 電動真空アクチュエータは、ピックアンドプレース、パレタイジング、マテリアルハンドリングなどの産業オートメーション向けに設計された、コンパクトで省エネルギーな EOAT ソリューションです.
重量はわずか 2.5 kg で、最大 10 kg の可搬質量に対応し、軽量構造で高い性能を発揮します. 24 V 低電圧システムで駆動し、エネルギー消費を従来の空圧システムの約 20% まで削減し、運用コストの低減に貢献します.
EVS は、さまざまなワークに対応するため、吸着力を 102 N から 510 N まで調整できます. コンパクト設計により空圧ソリューションより 30% 小型で、省スペースが求められるロボット用途に適しています.
ロボットへの直接取り付け、リアルタイムの真空フィードバック、インテリジェント監視機能により、EVS は自動生産ラインで安定した効率的かつ信頼性の高い運転を実現します.詳細 ロボット電動真空吸着カップロボット電動真空吸着カップは、真空吸着の原理に基づく電動駆動のエンドエフェクタです。内蔵真空ポンプを使用して負圧を発生させ、対象物を把持し、従来の手作業による搬送方法を効果的に置き換えます。コア設計には、インテリジェント制御システムと多層シーリング構造が統合されており、タイル、石板、ガラスなどの滑らかな表面またはやや粗い表面の搬送に適しています。詳細
ロボット電動真空吸着カップロボット電動真空吸着カップは、真空吸着の原理に基づく電動駆動のエンドエフェクタです。内蔵真空ポンプを使用して負圧を発生させ、対象物を把持し、従来の手作業による搬送方法を効果的に置き換えます。コア設計には、インテリジェント制御システムと多層シーリング構造が統合されており、タイル、石板、ガラスなどの滑らかな表面またはやや粗い表面の搬送に適しています。詳細


多指ロボットハンドグリッパ- FAQ
1. 多指ハンド
多指ハンドは、人間の手を模倣した高自由度のエンドエフェクタであり、ヒューマノイドロボットに把持、ねじり、回転、その他の複雑な作業を可能にします。
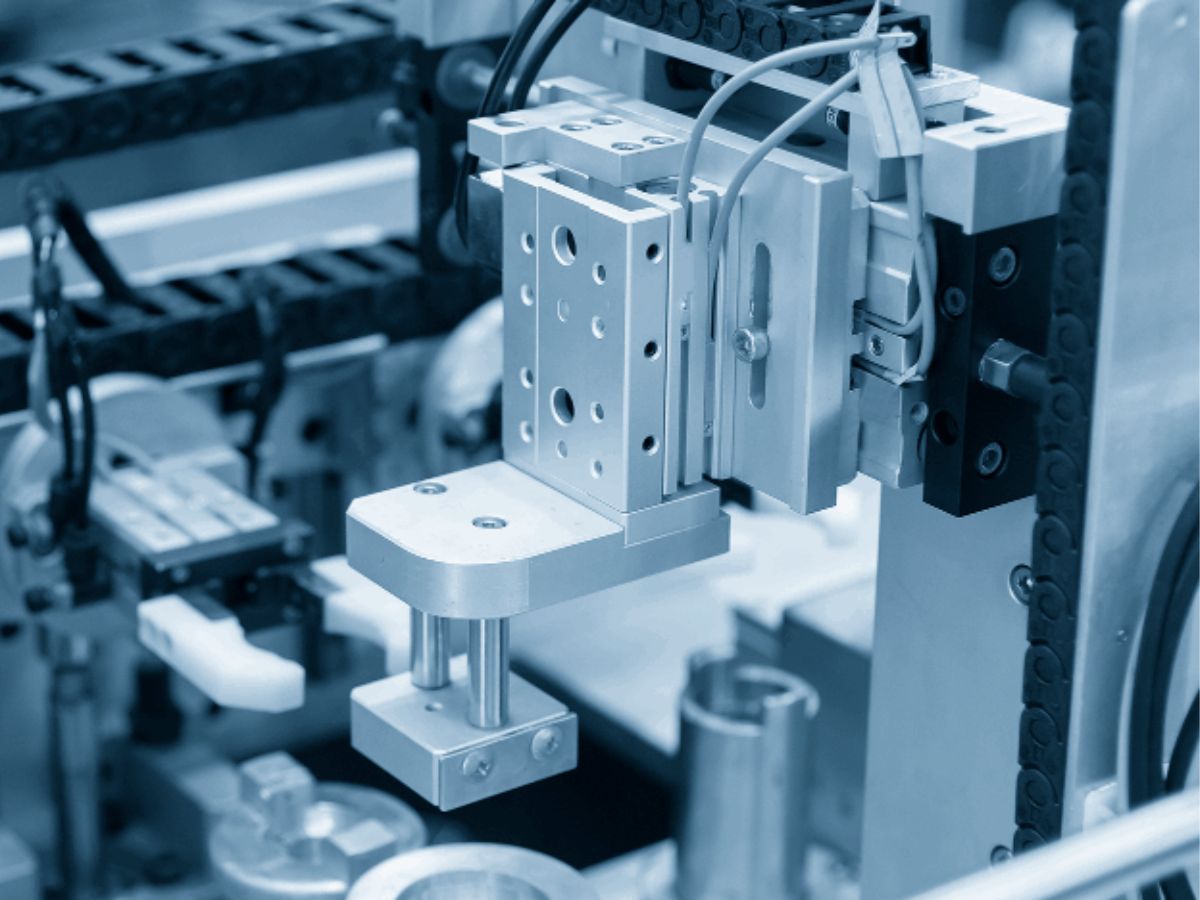
2. クランプ式エンドエフェクタ
これらは、対象物を確実に保持するために機械式グリッパーを使用し、産業用自動化で一般的に使用されています。
3. 真空/吸着式エンドエフェクタ
これらは、ガラス、包装材、電子機器などの平らな物品や軽量物のハンドリングに真空吸着を使用します。
4. 特殊エンドエフェクタ
溶接、塗装、研磨、または手術などの特定の作業向けにカスタム設計されたツール。
A. 可搬重量
エンドエフェクタと搬送対象物の両方の重量を含みます。対象物の重心によって生じるトルクは、ロボット手首部の許容荷重限界内に収まる必要があります。
B. 自由度 (DOF)
基本的なグリッパーは通常1つのDOF (開く/閉じる) を持ちますが、複雑な作業では複数のDOFが必要になる場合があり、柔軟性は高まる一方で、コストと制御の複雑さも増します。
C. 精度と繰り返し精度
高精度作業では、ミクロンレベルの繰り返し精度が求められます。電動グリッパーは通常、空圧式グリッパーよりも優れた位置制御を提供します。
D. 環境適応性
極端な温度、クリーンルーム、または防爆産業環境向けには、特殊設計が必要になる場合があります。
E. ツールチェンジャーシステム
自動ツールチェンジャーにより、ロボットは信頼性の高い機械、電気、および空圧/油圧接続を通じて、作業を迅速に切り替えることができます。
ヒューマノイドロボットが把持, 運搬, 組立, ねじり, 操作といった作業において真に人間を置き換えるためには, これらの動作は最終的に“手”を通じて実行されなければなりません.
ロボットのエンドエフェクタとして, 器用な手はロボットと外部世界との間の直接的な物理インターフェースとして機能します. その性能は, ロボットの実用的な能力の限界を根本的に決定します.
器用な手がなければ, ヒューマノイドロボットは“見る”ことや“歩く”ことはできても, 真に“行う”ことはできません.
これが, イーロン・マスクが器用な手をOptimusの開発における最も困難な技術的課題の1つと述べた理由です.
パッシブ自由度 (DoF):
これらの自由度は、モーターによって直接駆動されるものではありません。代わりに、動きはギア、腱、またはリンケージなどの機械要素を通じて伝達され、外力または連動する関節によって駆動される適応的な動きを可能にします。
アクティブ自由度 (DoF):
これらの自由度は、モーターによって直接かつ自動的に制御され、精密でプログラム可能な動きと力の制御を可能にします。
ハンド自体には内蔵ビジョンセンサーは統合されていません。しかし、外部ビジョンモジュールを追加することで視覚知覚を実現できます。
触覚知覚には、接触、圧力、相互作用力を検出するために、静電容量式またはピエゾ抵抗式(抵抗式)センシングパッドが必要です。
ピエゾ抵抗式センサーおよび静電容量式センサーの仕様は、お客様の具体的な製品構成および選定要件に応じて提供されます。
はい, 遠隔操作用の手袋をご提供しており, その価格は市場にあるほとんどの代替品よりも競争力があります。
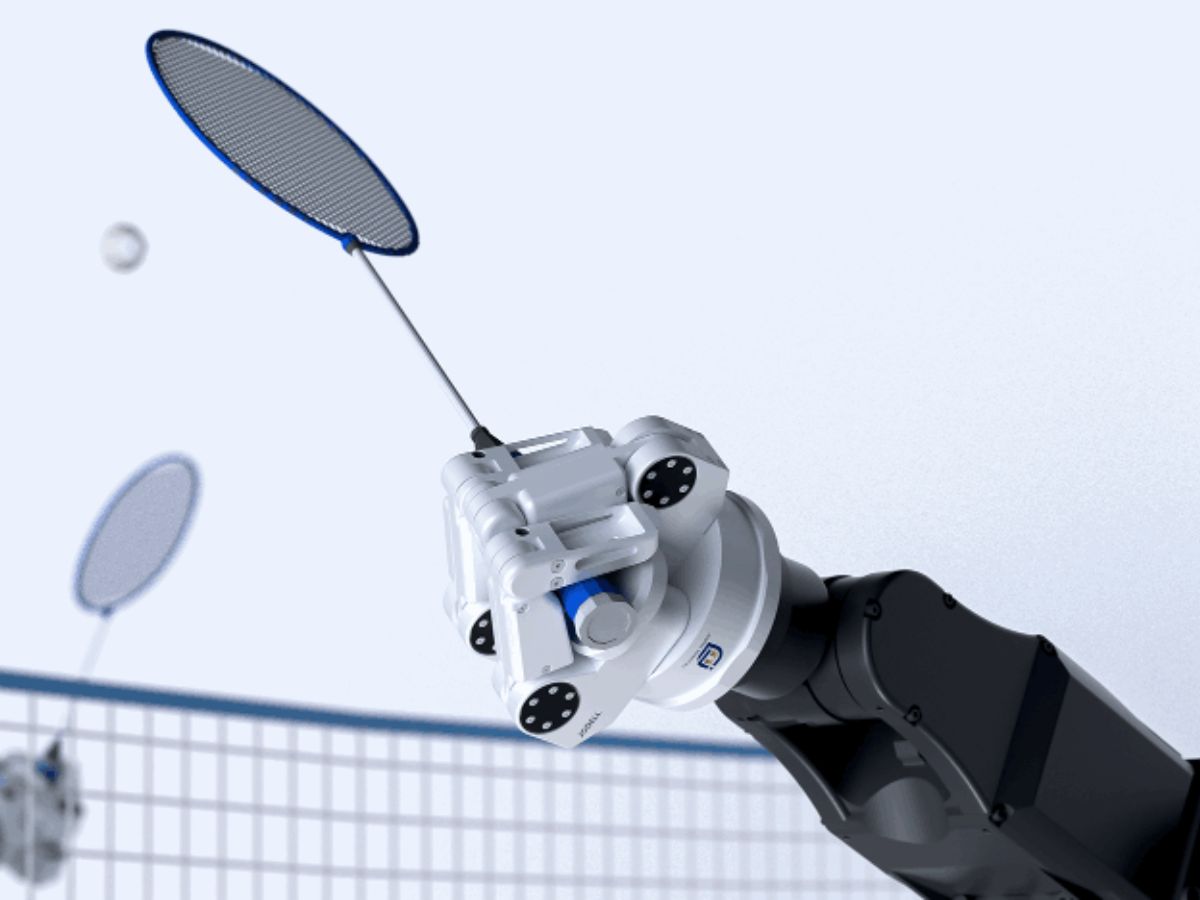
新世代のモジュール式ヒューマノイド器用ハンドであるLinker Hand L30は、手全体で22の自由度を備え、バイオミメティクスの原理と先進的なメカトロニクス技術を深く統合しています。
高度に人間らしい設計を実現しながら、高精度制御とリアルタイムセンシング機能も備えています。中核関節の速度は400°/sを超え、手全体の開閉はわずか0.2秒で完了します。
その高速な動作性能と精密な操作性は、ライブデモンストレーションで観客に強い印象を与えました。
HONPINEの器用なハンドは、自社開発の低コスト駆動モジュールとオープンソースのアルゴリズムフレームワークを組み合わせることで、性能とコストの最適なバランスを実現しています.
これは、さらに中国の確立されたサプライチェーンエコシステムによって支えられています。加えて、産業および医療分野における幅広い応用が、迅速な技術反復のための豊富な実世界データを提供しています。これらの要素が一体となって、グローバル競争力のある「中国発の技術ソリューション」を構築するための中核的基盤を形成しています。
生体模倣の腱駆動構造,高精度トルク制御,高速な動的応答を活用することで,HONPINEの器用なハンドは卓越した精密マニピュレーション能力を発揮します.
多自由度協調と力制御知覚の技術的優位性を十分に示し,精確で安定した,器用なロボットハンド操作を可能にします.
ロボティクスにおいて、エンドエフェクタとは、ロボットアームの先端に取り付けられ、外部環境と相互作用するツールのことです。End-of-Arm Tooling (EOAT) とも呼ばれ、ISO規格では、作業実行のためにフランジを介してロボットアームに接続される装置として定義されており、ロボットアーム自体の一部とは見なされません。
ロボット運動学において、エンドエフェクタは本質的にロボットの「手」です。それに取り付けられた座標系はツールフレームと呼ばれ、その原点は通常 Tool Center Point (TCP) として定義されます。ユーザーは特定の作業向けにTCPをカスタマイズすることもでき、例えばロボット溶接では、溶接ノズルの先端をTCPとして設定できます。
一般的なエンドエフェクタには、グリッパー, ツールチェンジャー, 溶接ガン, 吸着カップ, スプレーガンなどがあります。センサーを統合して、作業性能と精度を向上させることもできます。
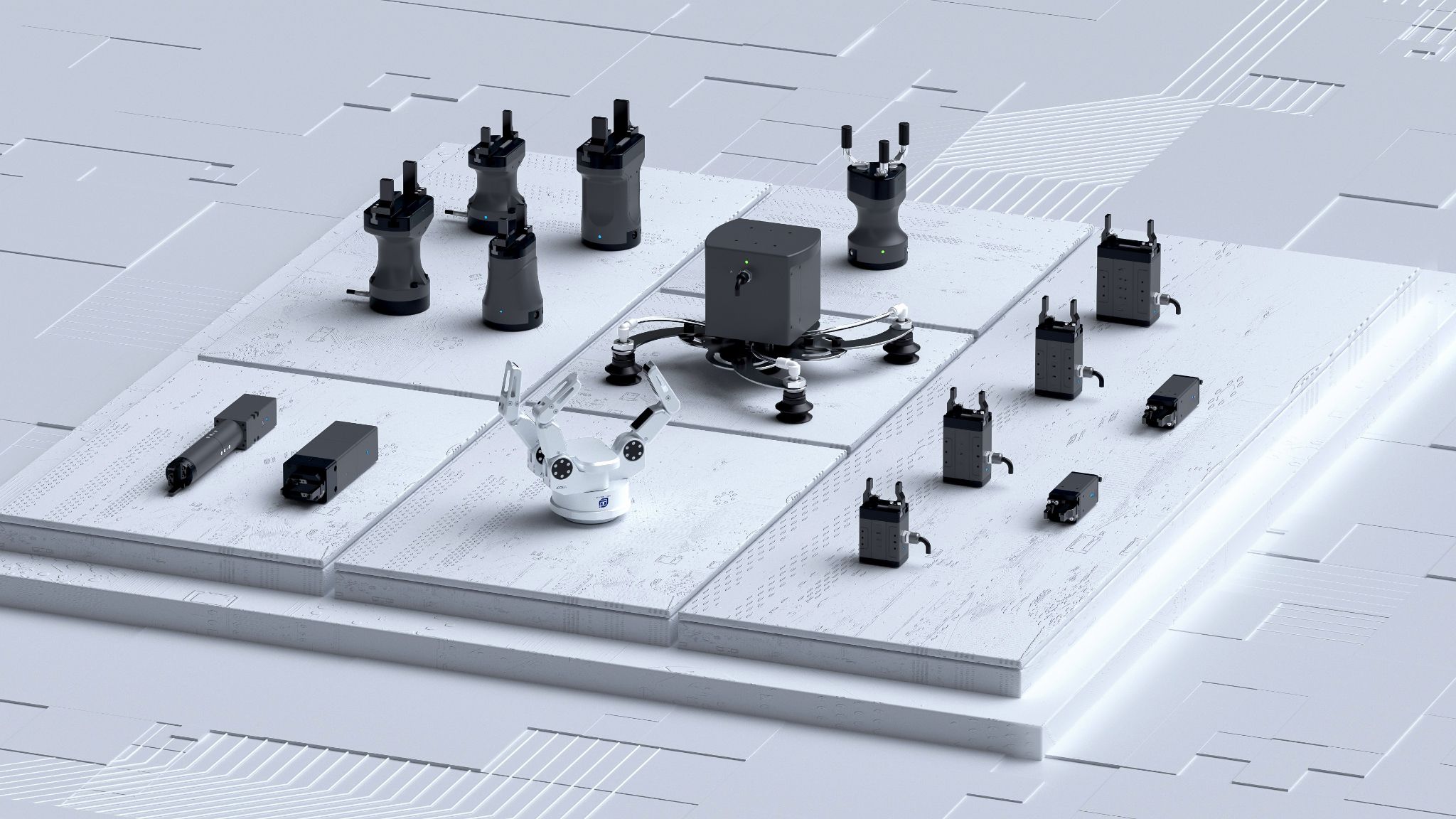
ロボットエンドエフェクタの用途
ロボットエンドエフェクタは、産業用多指ハンド、スマート電動グリッパー、電動吸着カップ、および医療自動化、リチウム電池、3C、半導体、食品業界向けの多機能モデルを含む9つのシリーズを提供しています。コンパクトな設計により、当社のアクチュエータは、高精度、高剛性、超ロングストロークを実現し、
精密な力制御を可能にします。ネットワークアプリケーションに対応し、設置が容易で、操作も簡単であり、多様な生産ニーズに対応する安全で効率的な自動化ソリューションを提供します。
‹


›

- 00
0000-00
ロボット関節用モジュールとは何ですか?最適なロボット回転関節アクチュエータをどのように選ぶべきですか?
- 00
0000-00
最適なハーモニックギアロータリーアクチュエータを選ぶための7つのステップ
- 00
0000-00
トルクセンサー内蔵 OMG 超小型ハーモニックドライブ関節モジュール
- 00
0000-00
なぜ高性能ヒューマノイドロボットの価格を下げることはそれほど難しいのでしょうか?そして、なぜハーモニック関節モジュールは依然として代替不可能なのでしょうか?
- 00
0000-00
Harmonic Drive Systems VS Nabtesco VS HONPINE ハーモニックドライブモーター





