ハーモニック・遊星フレームレスロボット関節用モーター
ハーモニックドライブ関節モジュール
HONPINEのハーモニックドライブ関節モーターは、高精度、高トルク、および大きな中空コア径を特長としており、限られたスペースでの用途にソリューションを提供することがよくあります。カスタマイズにも対応しており、これらのモーターは特殊ロボット分野で頻繁に使用されています。
 カスタム製造 高精度ギア CNCロボット機械用当社は、精密歯車の受注生産を専門としており、経験豊富なエンジニアチームと、米国、日本、ならびに国内有力サプライヤーから導入した30台以上の先進的なCNC歯車切削機を備えています。当社の一貫生産能力には、かさ歯車のスパイラル歯切り、ラッピング、研削、ホブ加工が含まれ、Oerlikon歯車ラッピング機、ベベルギア研削盤、精密検査設備を組み合わせています。試作から量産まで、原材料から完成品までのワンストップサービスを提供します.
カスタム製造 高精度ギア CNCロボット機械用当社は、精密歯車の受注生産を専門としており、経験豊富なエンジニアチームと、米国、日本、ならびに国内有力サプライヤーから導入した30台以上の先進的なCNC歯車切削機を備えています。当社の一貫生産能力には、かさ歯車のスパイラル歯切り、ラッピング、研削、ホブ加工が含まれ、Oerlikon歯車ラッピング機、ベベルギア研削盤、精密検査設備を組み合わせています。試作から量産まで、原材料から完成品までのワンストップサービスを提供します.
当社の精密歯車は、工作機械、減速機、UAV、ヒューマノイドロボット、鉱山機械、石油・ガス機械、化学処理システム、印刷設備、海洋用途、その他の高精度伝動システムで幅広く使用されています.
仕様: モジュール 0.5–30 mm | 直径 10–800 mm | 精度 DIN 5–8 | 歯車タイプ: 平歯車、はすば歯車、ベベルギア、ウォームギア、およびカスタム歯車。詳細 4軸CNC工作機械用カスタム金属部品CNC工作機械には、4軸マシニングセンタ、CNC旋盤、CNCボール盤、CNCフライス盤など多くの種類があり、これらはすべてCNC工作機械のカテゴリーに属します。4軸マシニングセンタは、フライス加工、穴あけ、リーマ加工、中ぐり、タッピング、ねじフライス加工を一体化したシステムで、複数の加工工程と優れた総合加工能力を備えています。当社のCNC工作機械用金属部品はカスタム設計に対応しており、お客様から提供された図面に基づいて製造できます。詳細
4軸CNC工作機械用カスタム金属部品CNC工作機械には、4軸マシニングセンタ、CNC旋盤、CNCボール盤、CNCフライス盤など多くの種類があり、これらはすべてCNC工作機械のカテゴリーに属します。4軸マシニングセンタは、フライス加工、穴あけ、リーマ加工、中ぐり、タッピング、ねじフライス加工を一体化したシステムで、複数の加工工程と優れた総合加工能力を備えています。当社のCNC工作機械用金属部品はカスタム設計に対応しており、お客様から提供された図面に基づいて製造できます。詳細


遊星ジョイントモーター
遊星関節モーターもロボット動力システムの中核部品です。ハーモニック関節モジュールと比較すると、減速比が小さく、出力速度が高く、剛性が高い一方で、全体の出力精度はやや低くなります。遊星減速機、フレームレストルクモータ、ブレーキ、エンコーダー、ドライバーを含む高度に統合されたコンポーネントにより、サイズと重量が大幅に最適化され、関節の高精度なモーション制御を実現します。これにより、より高いトルク、よりコンパクトな寸法、そしてより軽量な設計が可能になります。遊星関節モーターは通常、広い電圧範囲に対応し、低電圧DC 24V~48Vに適応します。また、個別のお客様の要件に基づくカスタマイズソリューションも提供しています。
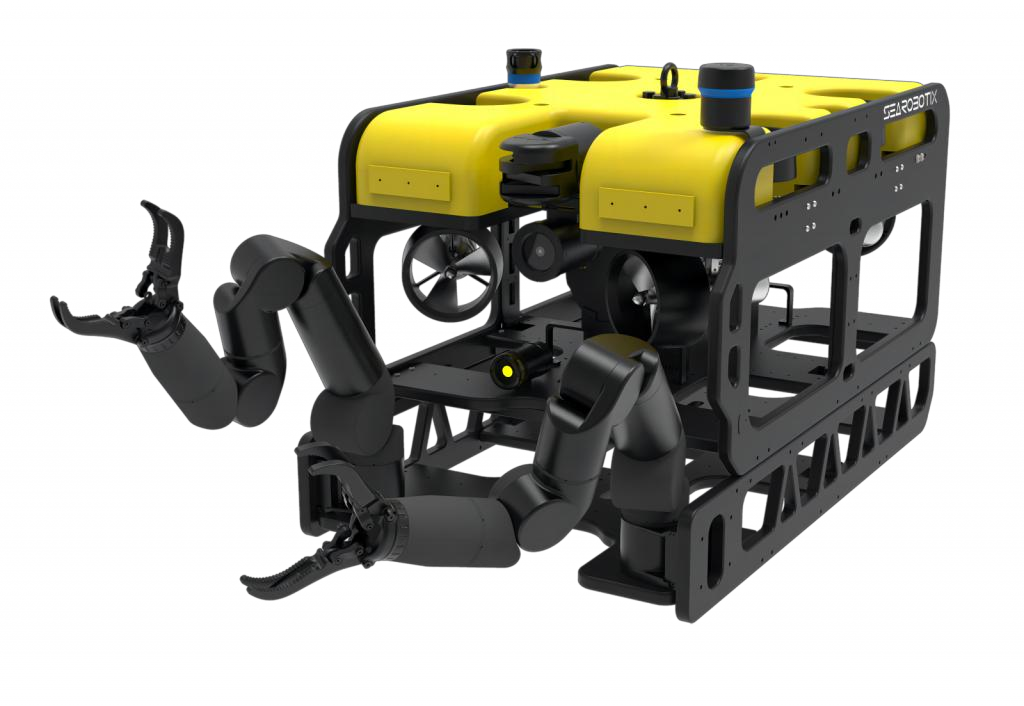
 耐爆ロボット犬用遊星ジョイントアクチュエーターHONPINEの高耐久防爆型プラネタリージョイントアクチュエータが正式に量産を開始しました。このシリーズのジョイントは、複数の四足歩行ロボット(ロボット犬)プラットフォームにすでに統合されており、石油化学プラント、天然ガス点検現場、緊急救助活動など、これまで人手作業や輸入部品に大きく依存していた危険な環境に導入されています。
耐爆ロボット犬用遊星ジョイントアクチュエーターHONPINEの高耐久防爆型プラネタリージョイントアクチュエータが正式に量産を開始しました。このシリーズのジョイントは、複数の四足歩行ロボット(ロボット犬)プラットフォームにすでに統合されており、石油化学プラント、天然ガス点検現場、緊急救助活動など、これまで人手作業や輸入部品に大きく依存していた危険な環境に導入されています。
アプリケーション別統合サポート: 各種ロボット構成やミッション要件に合わせて、機械構造と制御パラメータをカスタマイズします。
防爆認証サポート: 認証プロセス全体を通じて支援し、お客様がよくある設計上の落とし穴を回避し、適合までの期間を短縮できるよう支援します。
迅速な技術サポート: 全国の主要工業地域に技術サービスセンターを配置し、48時間以内の現地対応を提供します。詳細 最高トルク出力 軽量遊星関節モジュールHONPINE PAシリーズ遊星関節モジュールは、3件の独占発明特許と7件の実用新案特許を備えています。独創的な構造設計により、同クラス製品の中で最高のトルク出力を実現し、強力かつ安定した性能を提供します。
最高トルク出力 軽量遊星関節モジュールHONPINE PAシリーズ遊星関節モジュールは、3件の独占発明特許と7件の実用新案特許を備えています。独創的な構造設計により、同クラス製品の中で最高のトルク出力を実現し、強力かつ安定した性能を提供します。
HONPINEは豊富な製品リソースと技術サポートを提供し、さまざまなアプリケーションシナリオへの迅速な導入を可能にするとともに、プロジェクトの事前調査段階で必要となる時間、労力、コストを大幅に削減します。
このモジュールは、電源と信号の共有入力/出力設計を採用しており、駆動モジュール / アクチュエータ間の接続を大幅に簡素化します。中空貫通配線構造と組み合わせることで、駆動モジュール / アクチュエータの適用と統合がより便利で効率的になります。詳細 高速耐衝撃性 コンパクト軽量 遊星関節モジュール標準遊星関節モジュールは、ロボットの動力システムにおける中核部品です。遊星減速機、フレームレストルクモータ、ブレーキ、エンコーダ、ドライバーを組み合わせた高度に統合された設計により、体積と重量の大幅な最適化を実現し、関節の精密なモーションコントロールを可能にします。これにより、より大きなトルク、より小さなサイズ、より軽い重量を実現します。ハーモニック関節モジュールと比較して、遊星関節モジュールはより小さな減速比、より高い出力速度、より高いトルク密度を備えており、中低負荷用途により適しています。また、お客様の具体的な要件に合わせたカスタマイズサービスも提供しています。
高速耐衝撃性 コンパクト軽量 遊星関節モジュール標準遊星関節モジュールは、ロボットの動力システムにおける中核部品です。遊星減速機、フレームレストルクモータ、ブレーキ、エンコーダ、ドライバーを組み合わせた高度に統合された設計により、体積と重量の大幅な最適化を実現し、関節の精密なモーションコントロールを可能にします。これにより、より大きなトルク、より小さなサイズ、より軽い重量を実現します。ハーモニック関節モジュールと比較して、遊星関節モジュールはより小さな減速比、より高い出力速度、より高いトルク密度を備えており、中低負荷用途により適しています。また、お客様の具体的な要件に合わせたカスタマイズサービスも提供しています。
高速性能、耐衝撃性、コンパクトで軽量な設計といった中核的な利点により、標準遊星関節モジュールはヒューマノイドロボット、特殊ロボット、物流AGV、産業オートメーションにおける高負荷駆動の第一選択ソリューションとなっており、ロボット性能の向上とより広い応用シナリオの実現を推進しています。詳細



フレームレストルクモータ
フレームレストルクモータは、永久磁石同期モーター (PMSM) の特殊な一種であり、ローターとステーターの2つの中核部品で構成され、従来のモーター構造であるハウジング、ベアリング、シャフトを排除しています。お客様の機械システムへ直接組み込むことを前提に設計されており、エンドユーザーが対応するベアリングと筐体を用意する必要があります。この設計思想により、より高い柔軟性、よりコンパクトな寸法、優れた性能が実現され、スペース、重量、動特性に厳しい要求がある用途に最適です。ヒューマノイドロボットの関節駆動、精密回転ステージ、医療機器、産業オートメーションシステムを含む、高精度かつ高応答性が求められる用途で優れた性能を発揮します。フレームレストルクモータは、その構造構成に応じて、インナーローターフレームレスモーターとアウターローターフレームレスモーターにさらに分類されます。
 FM2 ロボット用高トルク密度フレームレスモーターHONPINE FM2 ロボット向けフレームレストルクモーターは、FM1シリーズと比較してより高い性能とより多くの構成オプションを提供し、より幅広い用途に適しています。モーター損失はFM1モーターと比較して20%低減され、トルク出力は10%向上し、動作持続時間の延長を実現します。
FM2 ロボット用高トルク密度フレームレスモーターHONPINE FM2 ロボット向けフレームレストルクモーターは、FM1シリーズと比較してより高い性能とより多くの構成オプションを提供し、より幅広い用途に適しています。モーター損失はFM1モーターと比較して20%低減され、トルク出力は10%向上し、動作持続時間の延長を実現します。
FM2シリーズはφ50mmからφ127mmまでの6種類の直径で提供され、定格回転数は1800 rpmから5500 rpm、トルクは0.36 Nmから6.40 Nm、出力は207 Wから608 Wです。定格電圧は24 Vから70 Vです。オプション構成には、ホールセンサー、温度センサー、カスタマイズ可能なリード線オプションが含まれます。これらのモーターは、協働ロボット、ヒューマノイドロボット、四足歩行ロボット、産業用ロボット、医療リハビリテーションロボットで広く使用されています。詳細 モーター") FM1 コスト効率に優れたフレームレスブラシレスDC (BLDC) モーターHONPINE FM1 フレームレスブラシレスDC (BLDC) モーターは、コンパクトで高性能、かつコスト効率に優れた製品です. 4種類のサイズ (φ50mm–φ115mm) で提供され, 定格速度は650 rpmから5250 rpm, トルクは0.3 Nmから9.32 Nm, 出力は165 Wから920 Wです. 定格電圧は24 Vから70 Vの範囲で, ホールセンサー, 温度センサー, 配線構成をオプションで選択できます. 協働ロボット, ヒューマノイドロボット, 四足歩行ロボット, 医療リハビリテーションロボットに広く使用されています.詳細
FM1 コスト効率に優れたフレームレスブラシレスDC (BLDC) モーターHONPINE FM1 フレームレスブラシレスDC (BLDC) モーターは、コンパクトで高性能、かつコスト効率に優れた製品です. 4種類のサイズ (φ50mm–φ115mm) で提供され, 定格速度は650 rpmから5250 rpm, トルクは0.3 Nmから9.32 Nm, 出力は165 Wから920 Wです. 定格電圧は24 Vから70 Vの範囲で, ホールセンサー, 温度センサー, 配線構成をオプションで選択できます. 協働ロボット, ヒューマノイドロボット, 四足歩行ロボット, 医療リハビリテーションロボットに広く使用されています.詳細 FMK 高度統合型ロボット関節用フレームレストルクモータフレームレストルクモータは,従来のサーボモータとは異なり,ステータとロータ部品のみで構成されています。フレーム付きモータと比較して,フレームレスモータは柔軟な構成と容易な取り付けを実現します。高度に統合された駆動システムの増加傾向を考慮すると,フレームレスモータはエンジニアの期待により適合します。エンジニアはシステム設計においてモータインターフェースを考慮する必要がなくなり,駆動システム内の動力出力ユニットが占有するスペースを最大限に削減でき,より高いシステム統合を実現します。HONPINE FMK フレームレストルクモータは現在,協働ロボットおよび双腕ロボットの J1–J6 関節,四足歩行ロボットの歩行関節,ヒューマノイドロボットの柔軟関節に広く使用されています。詳細
FMK 高度統合型ロボット関節用フレームレストルクモータフレームレストルクモータは,従来のサーボモータとは異なり,ステータとロータ部品のみで構成されています。フレーム付きモータと比較して,フレームレスモータは柔軟な構成と容易な取り付けを実現します。高度に統合された駆動システムの増加傾向を考慮すると,フレームレスモータはエンジニアの期待により適合します。エンジニアはシステム設計においてモータインターフェースを考慮する必要がなくなり,駆動システム内の動力出力ユニットが占有するスペースを最大限に削減でき,より高いシステム統合を実現します。HONPINE FMK フレームレストルクモータは現在,協働ロボットおよび双腕ロボットの J1–J6 関節,四足歩行ロボットの歩行関節,ヒューマノイドロボットの柔軟関節に広く使用されています。詳細 コンパクト 軽量 高出力密度 インナーローター フレームレス トルクモーターインナーローター フレームレス トルクモーターは、ローターとステーターという2つの中核部品で構成される特殊なタイプの永久磁石同期モーター (PMSM) です。ローターは内側に配置され、ステーターは外側に取り付けられます。その革新的な設計は、従来のモーター筐体、ベアリング、シャフトを排除し、ローターとステーターのアセンブリのみを残しています。ローターは通常、永久磁石を一体化したリング状構造を採用し、負荷軸に直接取り付けられます。ステーターは銅巻線と積層鉄心で構成され、電磁力を発生させてローターの回転を駆動します。この構成は、効率的な磁場相互作用によってトルク出力を実現し、ロボット関節用や産業用オートメーションなどの高精度用途に最適です。負荷をダイレクトに駆動できるため、機械伝達損失を最小限に抑えます。詳細
コンパクト 軽量 高出力密度 インナーローター フレームレス トルクモーターインナーローター フレームレス トルクモーターは、ローターとステーターという2つの中核部品で構成される特殊なタイプの永久磁石同期モーター (PMSM) です。ローターは内側に配置され、ステーターは外側に取り付けられます。その革新的な設計は、従来のモーター筐体、ベアリング、シャフトを排除し、ローターとステーターのアセンブリのみを残しています。ローターは通常、永久磁石を一体化したリング状構造を採用し、負荷軸に直接取り付けられます。ステーターは銅巻線と積層鉄心で構成され、電磁力を発生させてローターの回転を駆動します。この構成は、効率的な磁場相互作用によってトルク出力を実現し、ロボット関節用や産業用オートメーションなどの高精度用途に最適です。負荷をダイレクトに駆動できるため、機械伝達損失を最小限に抑えます。詳細

 モーター")


ハーモニックドライブロボット関節用モーターとは何ですか?
ハーモニック関節モーターは、ハーモニックドライブ、フレームレストルクモータ、ブレーキ、エンコーダー、駆動モジュール / アクチュエータを含む統合コンポーネントにより、サイズと重量を最適化しながら非常に高精度なモーション制御を実現します。HONPINEのハーモニック関節モーターは、デュアルエンコーダー、STO (Safe Torque Off)、保持ブレーキ、一体型トルクセンサーなど、多様な用途ニーズに対応する柔軟な構成オプションを提供します。

ハーモニックドライブロボット関節用モジュールの選定
多様な市場ニーズに対応するため、HONPINEのハーモニックドライブロボット関節用モーターは現在、HPJM、TCHL、HAGの3つの主要シリーズに分かれています。
本ガイドでは、コスト管理、納期、基本性能要件などの要素に基づき、お客様の用途に最適なアクチュエータを選定するための初期概要を提供します。
詳細な選定および技術サポートについては、ぜひお気軽にお問い合わせのうえ、さらにご相談ください。
主な特長
本シリーズは発売から5年以上が経過しており、十分に開発された成熟したヒューマノイドロボット関節用ソリューションを提供します。ハーモニックドライブ減速機、ドライバー、エンコーダー、フレームレストルクモータを統合しています。デュアルエンコーダーおよびブレーキのオプションに対応しています。CAN (独自仕様)、CANopen、EtherCAT通信プロトコルをサポートします。
主な利点
高いコンパクト設計により、同等の性能要件のもとでシステム統合のためのより多くのスペースを確保
オプションの低温グリースにより、-40°Cまでの過酷な環境に対応
平均納期 ≤ 4 weeks,安定した生産能力を確保
用途
安定性と信頼性の高い性能、迅速な量産納品、または低温環境での運転が求められるプロジェクトに最適です。
注意事項
本シリーズは当初、トルクセンサーや防水性能を前提として設計されていません。そのような機能が必要な場合はカスタマイズ対応が可能ですが、追加コストとより長い納期が見込まれます。
主な特長
この新シリーズは2025年末に発売予定で、自社開発のハーモニックドライブ減速機を採用し、より優れたコスト管理を実現します。標準でデュアルエンコーダー (単回転アブソリュート, 23-bit resolution) を搭載し、CAN FDおよびEtherCAT通信プロトコルをサポートします。オプション機能には、ブレーキとトルクセンサーが含まれます。一体型端子ハーネスは、中空シャフト配線およびモジュールのカスケード接続に対応しています。
主な利点
大幅なコスト優位性
前面、側面、背面の取り付け構成に対応し、高い構造柔軟性を提供
ハーネス設計により容易なシステム統合を実現
用途
設置柔軟性に高い要求があるコスト重視のプロジェクトに最適です。
注意事項
現在は101 gear ratioのみ利用可能です。全ギア比ラインアップは2026年6月に発売予定です。現在の納期は約6 weeksです。
主な特長
2026年に発売されたこの新シリーズは、特定の安全要件を満たすためにSTO (Safe Torque Off) 機能を搭載しています。国内有力ブランドのハーモニックドライブ減速機を採用し、高い製品信頼性を確保しています。CANopenおよびEtherCAT通信プロトコルをサポートし、ブレーキおよびトルクセンサーはオプションです。
主な利点
より高い安全基準を満たす
中核減速機部品の優れた性能と信頼できる品質
用途
明確な安全要件があるプロジェクト、または減速機の信頼性が最優先事項である場合に最適です。
注意事項
新たに発売されたシリーズのため、生産能力はまだ立ち上げ段階です。現在の納期は約8–10 weeksです。
ロボット関節用モーターのソリューションと用途
HONPINEは長年にわたり、ハーモニックロボット関節用モーターおよび遊星関節モーターを、ヒューマノイドロボット、双腕ロボット、車輪型ロボット、ドローン、農業機械、原子力設備、産業用ロボット、産業オートメーション設備などのさまざまな分野に適用し、これらの業界向けに関節モーターソリューションを提供するとともに、カスタマイズにも対応してきました。HPJM、TCHL、HAGなどのロボット関節用モーターシリーズは、実務サービスで得られた経験に基づいて開発されています。
‹







›

ハーモニックドライブ関節モジュールの利点と欠点は何ですか
ハーモニックドライブ関節モジュールの利点
超高精度
伝達バックラッシが最小限で、繰り返し位置決め精度は最大±0.01 mmに達し、精密なロボット動作に不可欠です。
高減速比
大きな単段減速比により、コンパクトなサイズで高トルク出力を実現し、効果的な“低速, 高負荷”性能を達成します。

極めてコンパクトな設計
シンプルな構造、小型、軽量設計により、手首やハンドなどのスペースに制約のあるロボット部品に非常に適しています。
高い統合能力
モーター、エンコーダー、その他の部品を組み合わせた統合モジュールとして販売されることが多く、便利な設置とメンテナンスを可能にしながら、モジュール設計をサポートします。
ハーモニックドライブ関節モジュールの欠点
ハーモニックドライブ減速機とハーモニック関節モーターのトルクセンサーはカスタム開発されているため、価格を下げることは困難です。しかし、近い将来、需要と生産能力が一定の水準に達すれば、価格が引き下げられる可能性があります。
ハーモニックドライブロボット関節用モジュール - よくある質問
HONPINEのハーモニックDC関節モーターは、エンボディドAI向けに特別設計されたハーモニックアクチュエータです。hpjmは最初に発売されたハーモニックアクチュエータであり、現在最も安定した性能と最短の納期を誇ります。お客様のニーズに対応するため、当社は最近2つの新しいハーモニックDC関節モーター、TCHLとHAGを発売しました。最新の製品パンフレットについてはお問い合わせください。
遊星関節モーター - よくある質問
JRM遊星関節モーターはHONPINEの軍用グレード製品であり、高性能ロボット犬で一般的に使用されています。現在、ヒューマノイドロボットのバイオニクス向けに、よりコンパクトな設計とより大きな中空部を備えたHPJMハーモニック関節モーターがまもなく発売されます。
ヒューマノイドロボット用ハーモニックドライブアクチュエータ- よくある質問
これらは、ヒューマノイドロボット関節用モジュールおよびアクチュエータシステムを評価する際に、顧客から寄せられる最も一般的な技術的および購買上の質問の一部です。トピックには、トルク選定, 減速比, モーション制御, 通信プロトコル, 熱管理, 動的歩行性能, およびヒューマノイドロボットプラットフォームとの統合が含まれます。
このガイドは、エンジニア, ロボティクス開発者, および調達チームが、さまざまなヒューマノイドロボットのサイズ, 可搬要件, およびアプリケーションシナリオに応じて適切な関節ソリューションをよりよく理解し、選定できるよう支援することを目的としています。
さらに多くのヒューマノイドロボットソリューションについてはhonpineまでお問い合わせください
ロボット関節用モジュール使用時の注意事項
関節モジュールの販売前および販売後に関する詳細については、お問い合わせください。HONPINEは1対1の技術サポートを提供します。
● 安全な操作:通電中はケーブルの抜き差しをしないでください。コンデンサを取り外す前に、完全に放電されていることを確認してください。
● 機器の設置: 設置構造に一体型関節の重量を支えるのに十分な機械的強度があることを確認し、確実に固定されていることを保証してください。
● ねじの締結: モーターと構造部品の間のねじを締結する際には、ねじ緩み止め接着剤とトルクレンチを必ず使用してください。モーターマニュアルに記載されたトルク仕様を厳守してください。
● 配線基準: ピン定義に厳密に従って配線を行ってください。識別をケーブルの色に頼らず、適切な抵抗整合を確保してください。
● 電源の使用: 電源電圧が一体型関節の定格電圧と一致していることを確認してください。ユーザーが外部リチウム電池を接続する場合、定格電圧が48Vであっても、満充電時の電池電圧は起動時に60Vを超える可能性があり、モーターの動作に影響を与えたり、モーターを損傷したりするおそれがあります。予防措置としては、電圧平滑化のために電解コンデンサを取り付けるか、電源電圧を安定化させるためにモーターの電源入力に電圧調整モジュールを直列接続する方法があります。
● バッテリー電源システム: バッテリー駆動システムでは、バッテリー自体が逆電流を吸収し、電圧が定格上限を超えるのを防ぐのに役立ちます。
● スイッチング電源システム: スイッチング電源システムでは、一体型モーターが急減速時または重力負荷によって駆動される際に回生エネルギーを発生させ、DCバス電圧が上昇して過電圧アラームを引き起こす可能性があります。これを防ぐため、大容量の電解コンデンサを並列に設置するか、電圧スパイクを低減するためにブレーキ抵抗を追加することを推奨します。
● 感電および挟まれ事故の回避: モーターの通電中, 運転中, または構造部品に接続されている場合は、感電や可動構造による挟まれ事故を避けるため、絶対に手でモーターに直接触れないでください。
● モーターの分解: 許可のないモーターの分解は禁止されています。分解は、協議のうえ専門家の指導の下でのみ、特別な状況に限り許可されます。無断分解を行うと保証は無効になります。
● 分解後の輸送: モーターを指導の下で分解し返送する必要がある場合は、振動や衝撃による輸送中の損傷を防ぐため、出荷前に減速機のねじ, リアカバーのねじ, その他の締結部品を含むすべての元のねじが適切に再取り付けされ、確実に固定されていることを確認してください。
業界動向





業界動向
